電機(jī)驅(qū)動(dòng)控制系統(tǒng)設(shè)計(jì) 從核心原理到研發(fā)實(shí)踐
電機(jī)及其控制系統(tǒng)是現(xiàn)代工業(yè)自動(dòng)化、新能源汽車、智能家電及機(jī)器人等領(lǐng)域的核心動(dòng)力來源與執(zhí)行單元。一個(gè)高效、可靠、智能的電機(jī)驅(qū)動(dòng)控制系統(tǒng),其設(shè)計(jì)與研發(fā)融合了電力電子、控制理論、微處理器技術(shù)和電機(jī)學(xué)等多學(xué)科知識(shí)。本文將系統(tǒng)闡述其設(shè)計(jì)要點(diǎn)與研發(fā)流程。
一、系統(tǒng)架構(gòu)與核心組成
一個(gè)典型的電機(jī)驅(qū)動(dòng)控制系統(tǒng)主要由三大部分構(gòu)成:功率變換模塊、控制模塊以及作為被控對象的電機(jī)本體。
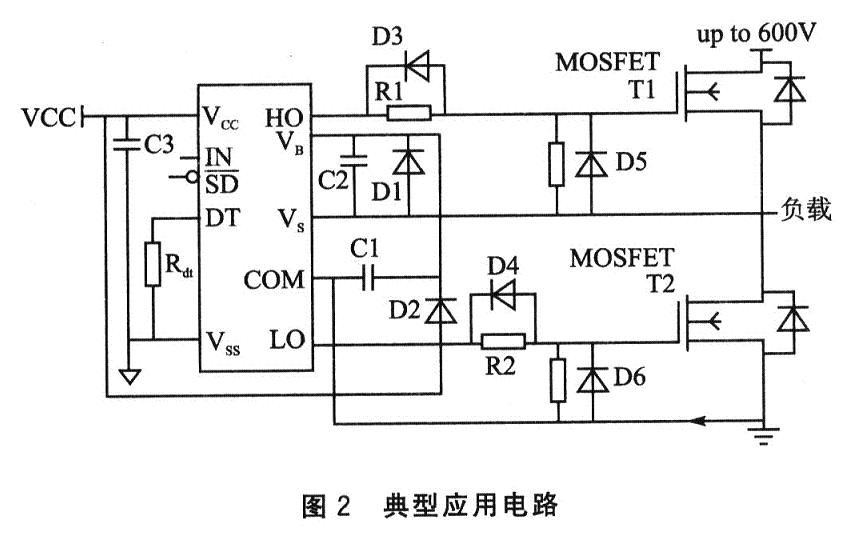
- 功率變換模塊:通常采用基于IGBT或MOSFET的逆變器,負(fù)責(zé)將直流電(或經(jīng)整流后的交流電)轉(zhuǎn)換為幅值、頻率可調(diào)的多相交流電,為電機(jī)提供驅(qū)動(dòng)能量。其設(shè)計(jì)關(guān)鍵包括功率器件選型、散熱設(shè)計(jì)、驅(qū)動(dòng)電路保護(hù)以及電磁兼容性(EMC)優(yōu)化。
- 控制模塊:作為系統(tǒng)的“大腦”,通常以微控制器(MCU)、數(shù)字信號處理器(DSP)或?qū)S抿?qū)動(dòng)芯片為核心。它負(fù)責(zé)執(zhí)行控制算法,實(shí)時(shí)處理來自電流/電壓傳感器、位置/速度編碼器的反饋信號,生成精確的脈寬調(diào)制(PWM)信號來控制逆變器。
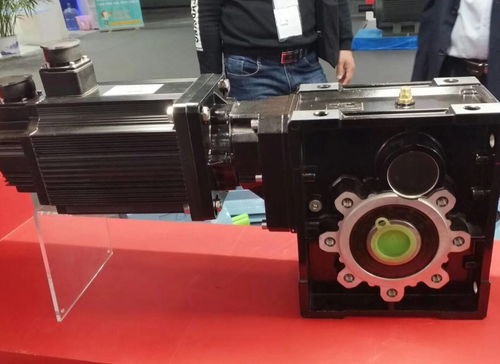
- 電機(jī)本體:常見的包括永磁同步電機(jī)(PMSM)、無刷直流電機(jī)(BLDC)、感應(yīng)電機(jī)(IM)等。電機(jī)的參數(shù)(如定轉(zhuǎn)子電感、電阻、永磁體磁鏈等)是控制系統(tǒng)建模與算法設(shè)計(jì)的基礎(chǔ)。
二、核心控制策略與算法研發(fā)
控制算法的目標(biāo)是實(shí)現(xiàn)電機(jī)轉(zhuǎn)矩、轉(zhuǎn)速或位置的精確、快速、平穩(wěn)控制。研發(fā)重點(diǎn)包括:
- 基礎(chǔ)控制環(huán):通常采用經(jīng)典的級聯(lián)控制結(jié)構(gòu),內(nèi)環(huán)為電流(轉(zhuǎn)矩)環(huán),外環(huán)為速度或位置環(huán)。電流環(huán)要求高帶寬以實(shí)現(xiàn)快速轉(zhuǎn)矩響應(yīng),常用基于電機(jī)模型的解耦控制(如對于PMSM的id=0控制或最大轉(zhuǎn)矩電流比控制)。
- 先進(jìn)控制技術(shù):為提升動(dòng)態(tài)性能與魯棒性,研發(fā)中常引入更復(fù)雜的算法,如:
- 矢量控制(FOC):通過坐標(biāo)變換實(shí)現(xiàn)交流電機(jī)類似直流電機(jī)的解耦控制,是高性能驅(qū)動(dòng)的標(biāo)準(zhǔn)方案。
- 直接轉(zhuǎn)矩控制(DTC):直接控制電機(jī)的磁鏈和轉(zhuǎn)矩,動(dòng)態(tài)響應(yīng)快,但對參數(shù)變化較敏感。
- 智能控制與觀測器:應(yīng)用滑模控制、模糊自適應(yīng)控制以增強(qiáng)魯棒性;采用模型參考自適應(yīng)系統(tǒng)(MRAS)、滑模觀測器(SMO)或擴(kuò)展卡爾曼濾波器(EKF)實(shí)現(xiàn)無傳感器控制,省去物理編碼器。
三、系統(tǒng)研發(fā)流程與關(guān)鍵技術(shù)考量
一個(gè)完整的電機(jī)驅(qū)動(dòng)控制系統(tǒng)研發(fā)遵循“需求分析-設(shè)計(jì)-實(shí)現(xiàn)-測試-優(yōu)化”的迭代過程。
- 需求定義與方案選型:明確應(yīng)用場景對轉(zhuǎn)矩、轉(zhuǎn)速、精度、效率、尺寸、成本及可靠性的要求,據(jù)此選擇電機(jī)類型、控制器硬件平臺(tái)和基礎(chǔ)控制架構(gòu)。
- 建模與仿真:利用MATLAB/Simulink、PLECS等工具建立電機(jī)、逆變器及控制系統(tǒng)的精確數(shù)學(xué)模型,進(jìn)行離線仿真驗(yàn)證算法可行性,并進(jìn)行參數(shù)整定,大幅縮短研發(fā)周期。
- 硬件設(shè)計(jì)與實(shí)現(xiàn):完成原理圖與PCB設(shè)計(jì),重點(diǎn)考慮:
- 采樣精度:高精度、低延遲的電流采樣電路是關(guān)鍵。
- 隔離與保護(hù):強(qiáng)弱電之間的信號隔離(如使用光耦或隔離運(yùn)放)、過流、過壓、過熱保護(hù)電路必不可少。
- 軟件實(shí)現(xiàn):將控制算法代碼化(通常使用C語言),在MCU上實(shí)現(xiàn)實(shí)時(shí)中斷服務(wù)程序,優(yōu)化計(jì)算效率與代碼結(jié)構(gòu)。
- 系統(tǒng)調(diào)試與性能測試:借助示波器、功率分析儀、動(dòng)態(tài)測功機(jī)等設(shè)備,在實(shí)際負(fù)載下測試系統(tǒng)的穩(wěn)態(tài)精度、動(dòng)態(tài)響應(yīng)、效率圖譜及溫升,并根據(jù)測試結(jié)果迭代優(yōu)化控制參數(shù)與硬件設(shè)計(jì)。
四、發(fā)展趨勢與挑戰(zhàn)
電機(jī)驅(qū)動(dòng)控制系統(tǒng)的研發(fā)正向更高性能、更高集成度、更智能化方向發(fā)展。具體體現(xiàn)在:
- 集成化與模塊化:高度集成的智能功率模塊(IPM)及“控制器+驅(qū)動(dòng)+保護(hù)”三合一的方案成為主流,有助于減小體積、提高可靠性。
- 智能化與網(wǎng)絡(luò)化:集成故障診斷、預(yù)測性維護(hù)功能;支持CAN、EtherCAT等工業(yè)總線,便于融入更大的自動(dòng)化系統(tǒng)。
- 追求極致效率:寬禁帶半導(dǎo)體(如SiC、GaN)器件的應(yīng)用可顯著降低開關(guān)損耗,提升系統(tǒng)效率與功率密度。
電機(jī)驅(qū)動(dòng)控制系統(tǒng)的設(shè)計(jì)是一項(xiàng)復(fù)雜的系統(tǒng)工程,其研發(fā)水平直接決定了終端設(shè)備的性能邊界。成功的研發(fā)需要深入理解電機(jī)電磁與熱力學(xué)特性、掌握現(xiàn)代控制理論與數(shù)字實(shí)現(xiàn)技術(shù),并具備扎實(shí)的電力電子硬件工程能力。隨著新材料、新器件與新算法的不斷涌現(xiàn),這一領(lǐng)域?qū)⒊掷m(xù)推動(dòng)著各行業(yè)動(dòng)力系統(tǒng)的革新與進(jìn)步。
如若轉(zhuǎn)載,請注明出處:http://www.gzfdnsy.com/product/63.html
更新時(shí)間:2026-04-02 10:46:10